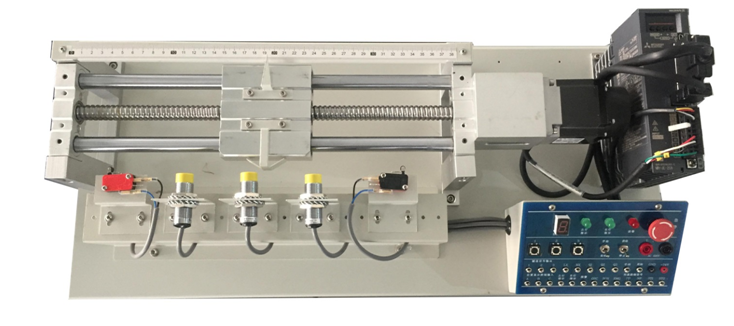
模型采用之山交流伺服驱动器及伺服电机,额定功率400W,采用配有直线移动装置(螺旋丝杠驱动)、位置显示尺、接近开关3个、限位开关2个、钢质安装底板、控制接口面板等。可完成步进系统和伺服系统参数的设置和系统的定位控制等。
注:需配主机数字量不少于10入7出,晶体管输出。

模型采用之山交流伺服驱动器及伺服电机,额定功率400W,采用配有直线移动装置(螺旋丝杠驱动)、位置显示尺、接近开关3个、限位开关2个、钢质安装底板、控制接口面板等。可完成步进系统和伺服系统参数的设置和系统的定位控制等。
注:需配主机数字量不少于10入7出,晶体管输出。